在追求高品質與環保健康的現代家裝趨勢下,“6AS+歐標環保家居冠軍賽”旨在通過嚴苛的工地巡檢,樹立行業標桿。本次,我們將鏡頭聚焦于碧桂園某項目的水電驗收現場,一探在科技賦能與高標準材料支撐下,水電隱蔽工程如何實現安全、規范與環保的深度融合。
一、 巡檢核心:科技與標準的雙重驗證
本次水電驗收巡檢,嚴格遵循“6AS+”施工管理體系與歐洲環保健康標準。巡檢重點不僅在于傳統的工藝規范性檢查,更引入了數字化工具與環保材料追溯系統:
- 線路智能檢測:使用專業電路檢測儀,對每一路強弱電進行通路、絕緣、電阻值測試,確保無短路、漏電隱患。通過APP實時記錄數據,生成電子化驗收報告,替代傳統手記,效率與準確性大幅提升。
- 水路壓力測試:采用高精度電動試壓泵,對冷熱水管進行長時間穩壓測試,監控壓力表指針變化,確保管道系統無絲毫滲漏,遠高于常規手動試壓標準。
- 材料溯源與環保核查:所有水電管線、線纜、輔料均需出示符合歐標環保等級(如低煙無鹵、抗菌性等)的檢測報告。通過掃描材料二維碼,即可追溯產品來源、生產批次及環保認證信息,從源頭杜絕不合格產品。
二、 現場直擊:工藝細節彰顯冠軍品質
在碧桂園項目工地,水電工程的“內功”清晰可見:
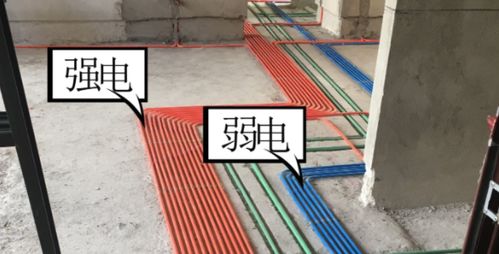
- 布線橫平豎直,標識清晰:強弱電線路分色敷設,間距規范,交叉處使用金屬過橋彎或錫箔屏蔽,有效防止信號干擾。所有管線走向均貼有標識帶,明確線路功能,便于后期維護。
- 水管走頂,保溫到位:熱水管全程包裹加厚橡塑保溫棉,有效減少熱量損耗,防止冷凝水滴落。冷熱水管間距統一,左熱右冷標準無誤。
- 點位精準,符合設計:所有開關、插座、出水口位置嚴格按設計圖紙施工,高度一致,水平無誤,完美對接后續安裝工序。
- 安全防護周全:裸露線頭使用保護帽絕緣,臨時用電規范有序,施工現場整潔,材料堆放整齊,充分體現標準化管理。
三、 水電維修材料的“科技內核”
“冠軍賽”級別的工程,離不開高品質維修材料的支撐。本次巡檢特別關注了新型科技材料的應用:
- 管線系統:采用PPR抗菌水管,管內壁光滑不易結垢,具備長效抗菌性能;電線則選用高純度無氧銅芯線,導電性好、發熱低,壽命更長。
- 連接與保護:使用高性能電工膠帶、阻燃型線管及接線端子,確保連接牢固、絕緣可靠。新型防水涂料的應用,使衛生間、陽臺等濕區電路防護等級更高。
- 智能預埋:為適應未來智能家居需求,關鍵位置預埋了彈性較大的專用套管,方便后期升級穿線,體現了“科技向前看”的前瞻性。
四、 以巡檢促規范,以科技提品質
本次碧桂園水電驗收工地巡檢,不僅是“6AS+歐標環保家居冠軍賽”的一次實戰檢驗,更是行業向透明化、數字化、高環保標準邁進的一次展示。它證明,通過嚴格的施工管理、科技工具的輔助以及頂級環保材料的應用,水電這類隱蔽工程完全可以做到可視、可測、可追溯,真正實現“匠心隱藏于內,品質彰顯于外”。這為業主帶來了安心,也為整個家裝行業的品質升級提供了可復制的范本。